Science & Innovation
Versatile, practicality and economically efficient
Development of a mobile robot for automated masonry construction
Loading...Robotic systems for the automated creation of masonry have been researched for several decades. Well-known representatives include the Hadrian X® from the Australian company Fastbrick Robotics as well as the cable robot developed at the University of Duisburg-Essen. In the view of the Dresden researchers, both systems as well as other existing concepts have some disadvantages that obstruct their practical and economic usage on real construction sites. The Hadrian X, for example, cannot lay bricks within the conditions of EUROCODE 6, while the installation of a cable robot is very complex and requires a large footprint around the building. Furthermore, the working area and thus the possible building size is very limited in both cases. The suitability within highly dynamic and high-density construction sites remains questionable and has yet to be proofed.

The concept of Wallbot is based on a mobile robot that moves on the floor slab. It can create buildings of any size. Major differences to the aforementioned systems are the compact size, low overall weight and high maneuverability. With a length of just 1,5 m, a width of 0,75 m and a target weight of less than 700 kg, the robot is able to move within closed building structures and on partially cured ceilings. It can also pass-through standard door openings according to DIN 18100. An omnidirectional drive based on Mecanum wheels is used for relocation of the robot. This enables movements in any direction as well as turning on spot. For the transport of the robot from one floor to the next a crane, forklift or freight lift can be used.
Wallbot shall process commercially available flat blocks made of autoclaved aerated concrete, sand-lime, clay, lightweight concrete or hybrids for thin-bed mortar applications. Setting up and starting brick laying is simple and designed to meet the demanding conditions on a typical construction site. Once the set-up is completed the robot may commence building at once. Wallbot communicates data continuously for site management, construction monitoring and supply chain. The necessary information is derived from the adapted building information model. This model contains all relevant masonry information.
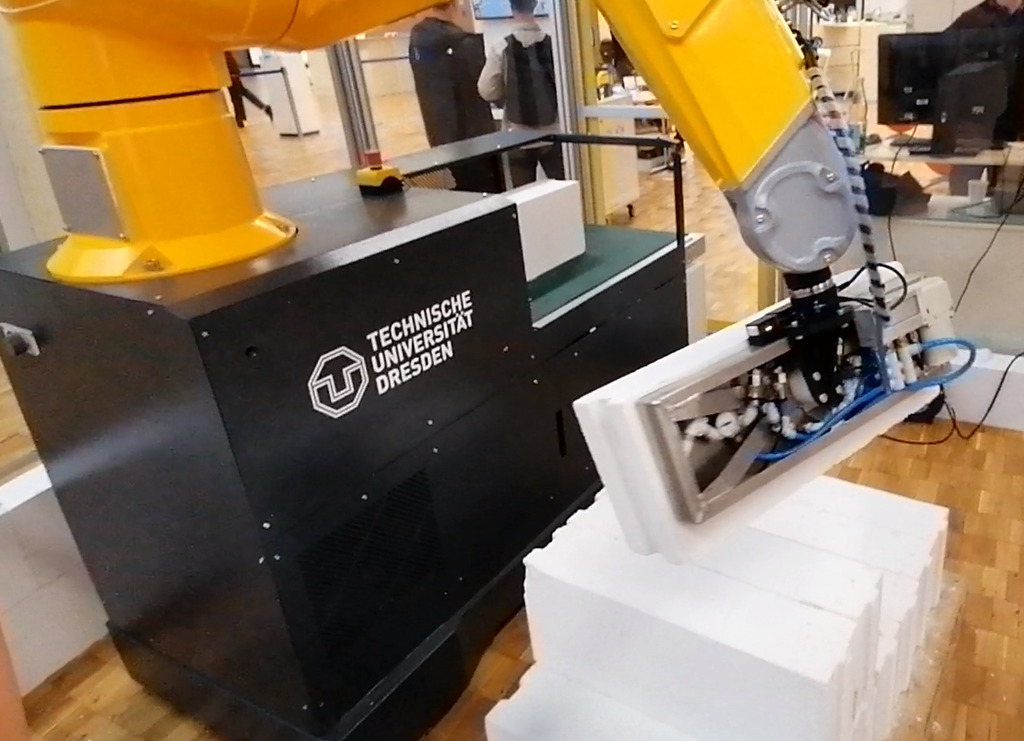
The brick laying itself can be described as a complex chain of repeated individual routines: The bricks are picked up and placed using a vacuum gripper, which is optimized for picking up, holding, moving, accelerating and retarding porous bricks of different lengths and widths. For this purpose, the special designed gripper has an adapted surface with several suction chambers. Depending on brick size the chambers can be adaptively evacuated. This enables safe gripping in vertical as well as in horizontal positions. An integrated force-torque sensor at the gripper enables force-controlled picking and depositing of bricks. This technology ensures correct force at the butt joint and no gap between the bricks.

The robot is equipped with several sensors for real-time environmental detection. With the help of these sensors, collisions with objects or people in the working area are avoided.
Studies revealed that the key to automated masonry building lies in the tolerance management of bricks, blocks, tiles and walls. The invented technology of continuous measurement in different systems, control and adaption led to the application of an underlying patent which represents the new level of knowledge necessary for automatically building walls based on standard materials and under given building norms. These extensive fundamental works resulted in the distinguishing integrated features of the system: A saw for cutting of the bricks as well as an automatic application system for thin-bed mortar are integrated into the robot. After picking up the bricks they are placed on a conveyor belt and processed in the machine. The mortar is applied to position joint and butt joined if allocated. Subsequently to this process the bricks will be picked up again and deposited in the wall.
Wallbot is also the first system that is capable of localizing pallets, detecting bricks and picking them up autonomously. Therefore, pallets with bricks can be placed somewhere in the working area of the robot, there is no need for exact positioning on a predefined place. For the detection and localization of pallets and bricks various sensors are used, such as a 3D camera’s and a LiDAR.
In order to operate autonomously it is necessary to ensure a continuous supply of electrical energy and mortar. The maximum processing time for freshly mixed thin-bed mortar is 3.5 hours. After this time new mortar must be mixed. The integration of the necessary mixing technology into the robot is not possible, as the predefined limits regarding dimensions and weight of the system would be exceeded. The situation is similar with the electric batteries, whose overall size is also limited. As solution a base station, responsible for the automated charging of the batteries as well as mixing and the refilling new mortar, is under development. The robot approaches the base station autonomously and connects to it via an automated docking system. In addition to the functions of electrical charging and automated mortar refilling, it is also conducts for cleaning Wallbot´s internal mortar application system.
The combination of Wallbot and base station can reduce the required construction time by more than 40 %. Necessary personnel deployment as well as labour costs can be reduced by up to 80 %. In addition to consistent quality with high production output, the solution also enables employees to be relieved of manual labor that causes long-term damage to health.
Over the last two years, a first demonstrator was developed by TU Dresden and key functionalities tested. The first demonstrator was presented at bauma in Munich in 2022. The next step is to further develop this demonstrator and test it on a real construction site. With the support of the Chair of Construction Machinery at Technische Universität Dresden and its industry partner the Researcher plan to spin off and change the way how masonries are built since centuries. Interested parties, supporters and early adapters in representative markets are invited to contact the research team.
Chair of Construction Machinery
The Chair of Construction Machinery at Technische Universität Dresden is one of the leading research institutions in the field of construction machinery. Its scientific expertise is subdivided into various fields of activity. This includes research into new construction methods, components and drive concepts as well as the automation of construction machinery and the development of new construction site robots.
![]()
![]()
Technische Universität Dresden
Chair of Construction Machinery
01062 Dresden, Germany
www.tu-dresden.de/ing/maschinenwesen/imd/bm/